The BL440 (RK3576)-based IGH EtherCAT ARM motion controller achieves an ideal balance between performance, real-time capability, openness, and cost.
Case Details
As industrial automation advances toward higher speeds, multi-axis coordination, and greater intelligence, the limitations of traditional closed-source motion controllers—in terms of cost, flexibility, and ecosystem extensibility—have become increasingly apparent. Open motion control solutions based on ARM architecture + real-time Linux + IGH EtherCAT master are emerging as a preferred choice for OEM equipment manufacturers and system integrators. The BL440 industrial controller (powered by Rockchip RK3576) is a high-performance ARM motion control platform specifically designed for this trend, leveraging the open-source IGH EtherCAT master for superior real-time performance and openness.
New Demands in Industrial Motion Control
Modern industrial equipment imposes higher requirements on control systems:
- Multi-axis servo synchronization and high-precision interpolation
- EtherCAT real-time bus (control cycle ≤1 ms)
- Integration of control, logic, and edge computing
- Long-term stable operation with low power consumption and fanless design
- Open software architecture to avoid vendor lock-in
In this context, ARM + EtherCAT software master solutions offer high cost-effectiveness and have become a mainstream approach.
BL440 + RK3576: ARM Platform Optimized for Motion Control
Core Advantages of RK3576 The RK3576 is Rockchip's high-performance octa-core ARM SoC (4×Cortex-A72 + 4×Cortex-A53) targeted at industrial and edge computing, featuring:
- Robust computing power balancing real-time control and upper-layer applications
- High memory bandwidth suitable for multi-axis motion and real-time communication
- Abundant high-speed interfaces (multiple Gigabit Ethernet, PCIe, USB, etc.)
- Industrial-grade long-term supply and wide-temperature stability (-40°C to 85°C)
Key Features of BL440 Industrial Controller
- Industrial-grade design for 7×24 continuous operation
- Multiple Ethernet ports, ideal for EtherCAT master deployment
- Fanless, low-power design for easy integration into equipment
- Versatile roles: motion controller / soft PLC / edge computing gateway
IGH EtherCAT: Open-Source High-Performance EtherCAT Master Core
IGH EtherCAT Master is a widely adopted open-source EtherCAT master software in the industrial field, running in real-time Linux environments with:
- Support for Distributed Clocks (DC) synchronization
- Compatibility with mainstream CiA402 servo drive protocols
- High real-time performance and low jitter
- No licensing restrictions, ideal for commercialization and custom development
Deploying Linux + PREEMPT_RT + IGH EtherCAT on the BL440 enables rapid construction of a complete motion control core.
Motion Control Capabilities Enabled by BL440 + IGH EtherCAT
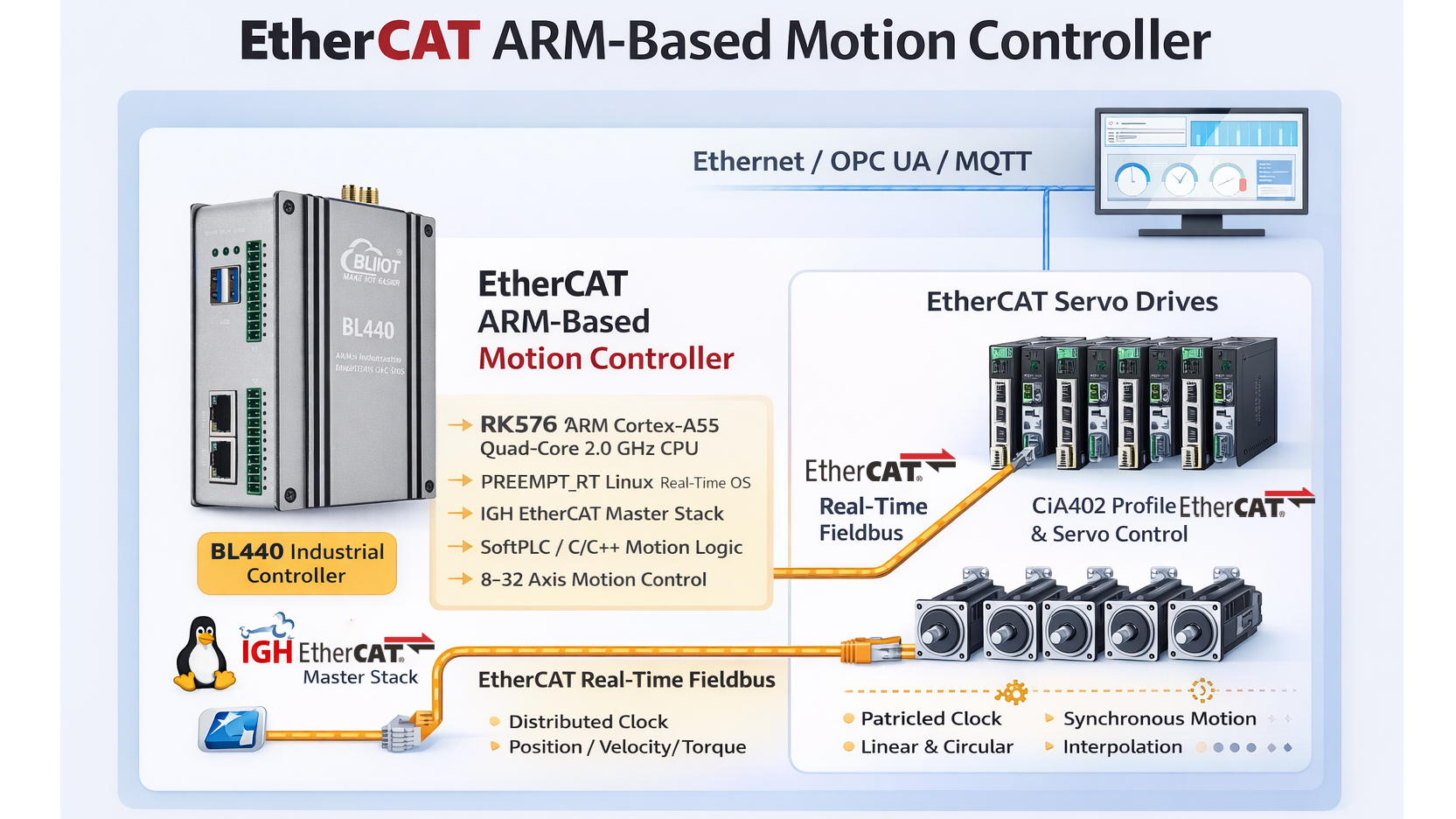
Motion Control Features
- Multi-axis synchronized control (8–32 axes, depending on application complexity)
- Position, velocity, and torque modes
- Electronic gearing and electronic camming
- Linear, circular, and spline interpolation
- High-speed synchronized I/O triggering
- Real-time servo status and alarm feedback
Software Integration Capabilities
- Integrated soft PLC (OpenPLC or custom)
- Real-time motion algorithms in C/C++
- Non-real-time layers in Python/Node.js
- Seamless collaboration with vision systems, AI, and MES
Advantages Over Traditional Closed-Source Controllers
| Comparison Item |
Traditional Closed-Source Controller |
BL440 + IGH EtherCAT |
| Architecture |
Closed |
Fully open |
| EtherCAT Implementation |
Dedicated hardware |
Software master |
| Extensibility |
Limited |
Highly customizable |
| Cost |
High |
Significantly reduced |
Typical Application Scenarios
- Packaging machinery (sealing, filling, labeling)
- Multi-axis dispensing/spraying equipment
- Lithium battery/photovoltaic automation lines
- Electronics assembly and testing equipment
- Conveyor lines and synchronized sorting systems
- Industrial robot/AMR subsystems
Conclusion
The BL440 (RK3576)-based IGH EtherCAT ARM motion controller achieves an ideal balance between performance, real-time capability, openness, and cost. It is not just a high-performance motion controller but a deeply customizable industrial automation platform. For industrial equipment manufacturers seeking high cost-effectiveness, multi-axis control, domestic substitution, and system integration capabilities, the BL440 is the ideal choice for building next-generation motion control systems.




























































