ARM-based industrial controller suitable for IGH EtherCAT under the Linux-RT (real-time) kernel, enabling users to directly deploy EtherCAT master functions with high determinism and reliability.
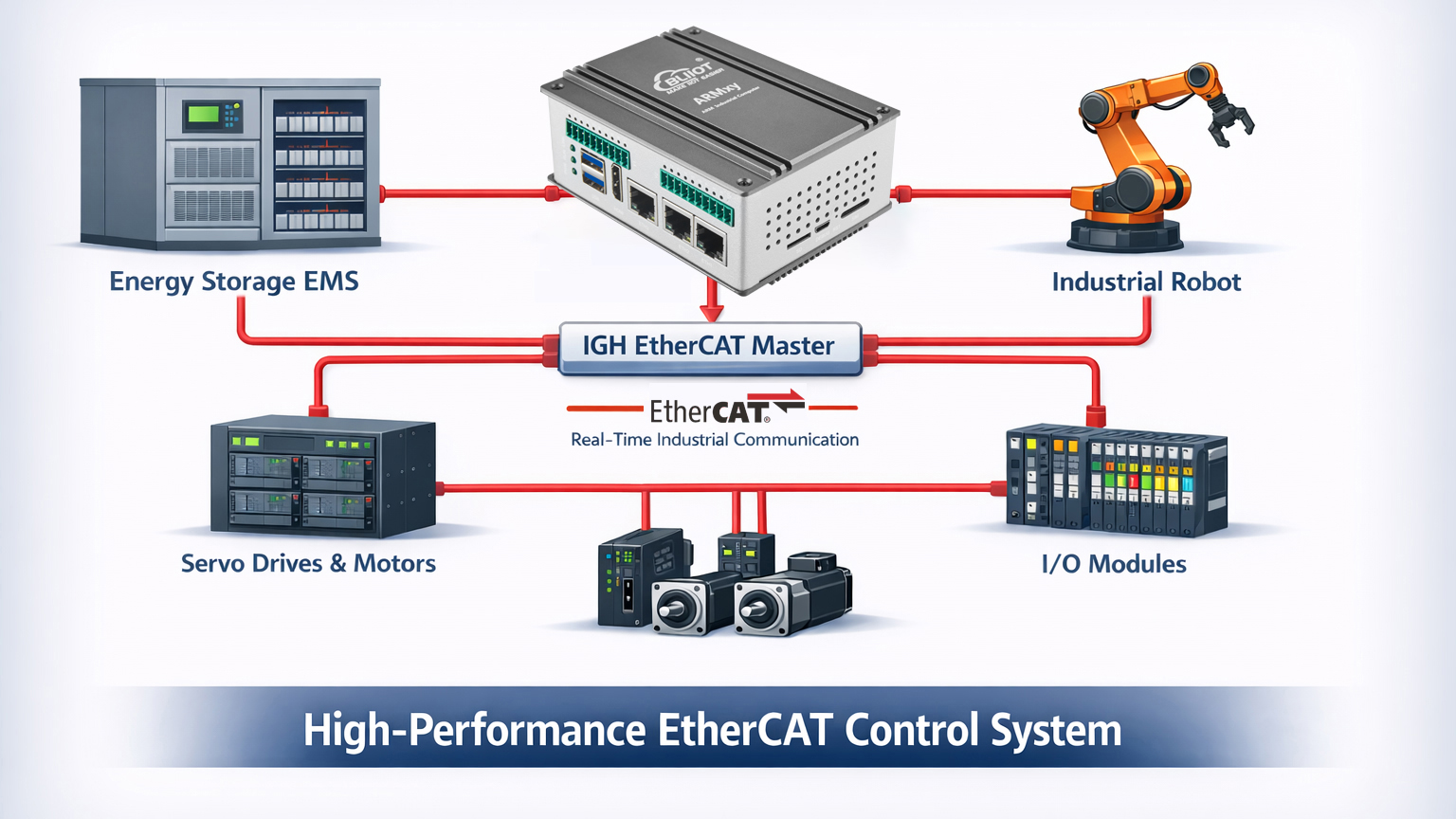
IGH EtherCAT is an open-source, high-performance EtherCAT master stack widely used in industrial automation, motion control, energy storage systems (EMS), robotics, and other real-time control applications.
ARM-based industrial controllers from Shenzhen Beilai Technology Co., Ltd. have been fully validated and adapted for IGH EtherCAT under Linux-RT (real-time) kernels, allowing users to deploy EtherCAT master functionality directly with high determinism and reliability.
System Requirements
Before installing the IGH EtherCAT master, ensure that the system meets the following requirements:
Software
Hardware
-
At least one dedicated Ethernet interface
-
Gigabit Ethernet is recommended
-
The selected Ethernet port should be exclusively used for EtherCAT communication
IGH EtherCAT Master Installation Procedure
1️⃣ Verify the Linux Kernel Version
Run the following command to confirm that the system is using a real-time kernel:

If the output contains PREEMPT_RT, the system meets the requirements.
2️⃣ Extract the IGH EtherCAT Master Package
Copy the IGH EtherCAT master package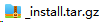 provided by Beilai to the device filesystem and extract it:
provided by Beilai to the device filesystem and extract it:
After extraction, the _install directory will be generated, containing the following subdirectories:
| Directory |
Description |
| bin |
EtherCAT command-line tools (e.g., ethercat) |
| lib |
Runtime libraries required by IGH EtherCAT |
| modules |
Kernel modules for the EtherCAT master and network driver |
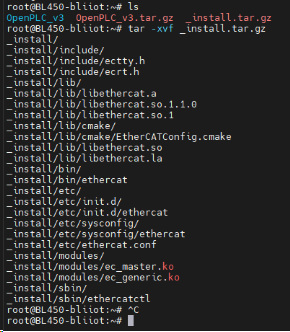
3️⃣ Obtain the Ethernet Interface MAC Address
Run:
Record the MAC address of the Ethernet interface that will be used as the EtherCAT master (Gigabit Ethernet is recommended).
4️⃣ Load the EtherCAT Master Kernel Module
Enable kernel log output for debugging:
Load the EtherCAT master driver (replace the MAC address with the actual one):

5️⃣ Install EtherCAT Configuration Files
⚠️ Warning messages generated during depmod -a do not affect functionality and can be safely ignored.
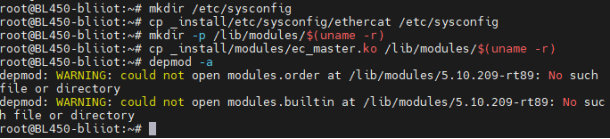
6️⃣ Start the EtherCAT Master Service

7️⃣ Configure the IGH Dynamic Library Path
After this step, EtherCAT demo programs or user-compiled applications can be executed.
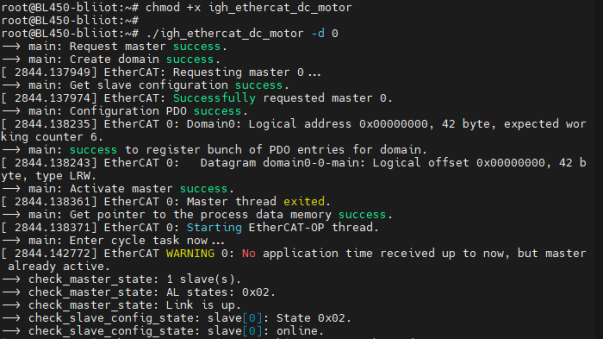
8️⃣ Check EtherCAT Slave Status
Navigate to the bin directory and run:

If slave devices are detected successfully, the EtherCAT master is running correctly.
Servo Motor Control Example
Beilai Tech provides a servo motor control demo based on IGH EtherCAT , which includes the following features:
, which includes the following features:
-
Forward and reverse motor rotation control
-
Real-time measurement of maximum and minimum EtherCAT cycle times
-
Continuous output of timing statistics via serial interface
1️⃣ Running the Demo Program
2️⃣ EtherCAT Cycle Time Parameters
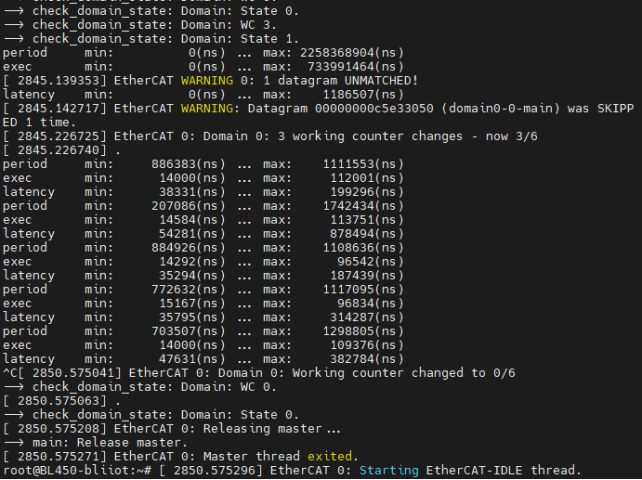
The demo program is configured with a 1 ms EtherCAT communication cycle by default. Parameter descriptions are as follows:
| Parameter |
Description |
| latency |
Thread wake-up latency (ns) |
| period |
EtherCAT communication cycle time (ns) |
| exec |
EtherCAT data receive/send execution time (ns) |
Typical Application Scenarios
This IGH EtherCAT solution is suitable for:
-
Energy Storage EMS / PCS control systems
-
Multi-axis servo and motion control
-
Industrial robots and AMRs
-
High real-time industrial automation equipment
-
AI-powered EtherCAT edge controllers
Summary
The IGH EtherCAT master running on a Linux-RT kernel provides ARM industrial controllers with:
-
Microsecond-level real-time communication
-
Low jitter and deterministic EtherCAT control
-
Stable operation in harsh industrial environments
When combined with Beilai ARM Edge Controllers ARMxy series (such as BL440 / BL450), it enables the construction of a high-performance, low-power, and scalable EtherCAT control platform.





























 provided by Beilai to the device filesystem and extract it:
provided by Beilai to the device filesystem and extract it:





 , which includes the following features:
, which includes the following features:


